Project results: Parametrzation of a driver behavior model
- Analysis of 18 data sets with 16 sections each in less than one day
- Parametrization of a driver behavior model based on the analysis results
- Support for implementation of the driver model in a test car
Driver behavior modeling plays an important part during the development of driver assistance systems and a driver-friendly transition to automatic driving. For example, the prediction of intended driving maneuvers and reaction times allows the software developers to adjust the timing of assistance systems and to initiate or cancel interventions.
As part of a the UR:BAN project with Fraunhofer IAO and BMW Group, we have analyzed the eye movement behavior, when drivers pass pedestrians at the sidewalk. In average 15 % of all road fatalities are attributed to pedestrians each year. Euro NCAP rules are including active pedestrian protection systems. This is the reason why the understanding of pedestrian perception and driver behavior modeling is an important research question for road safety. Figure 1 (left) shows two typical traffic situations with a pedestrian, on the right side a warning cascade is presented to avoid a collision between the car and the pedestrian.

Figure 1: The understanding of visual perception of pedestrians is important to adjust the timing of assistance systems and to initiate or cancel interventions.
The key technology for analyzing the visual perception of pedestrians is eye tracking. In our project Blickshift was responsible for analyzing eye movements from an eye tracking experiment. The goal was to define parameters of a state transition model, which decides to warn a driver about a pedestrian, see Figure 2.
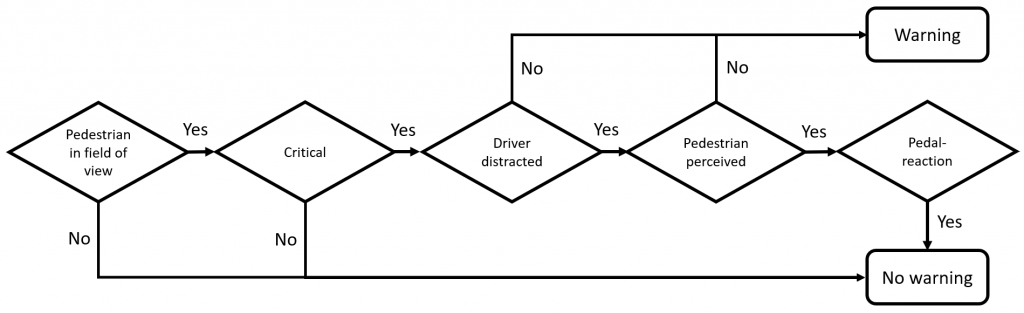
Figure 2: By analyzing the eye movement behavior, a state transition model has been parametrized in order to warn a driver about a pedestrian.
In a driver simulation experiment 18 participants have driven nine minutes the same route. The route was divided into 14 sections, representing different traffic situations with and without pedestrians. In some sections the pedestrians did not moved, in others they have moved towards the road with different velocities. Besides eye movements, pedal activity was recorded.
The critical parameter of the model was the distance between the fixation position in the traffic and the position of the pedestrian. The hypothesis was, that the more often this distance was below a certain threshold, the higher the probability was, that the driver has perceived the pedestrian. Our job was to make a proposal about this threshold.
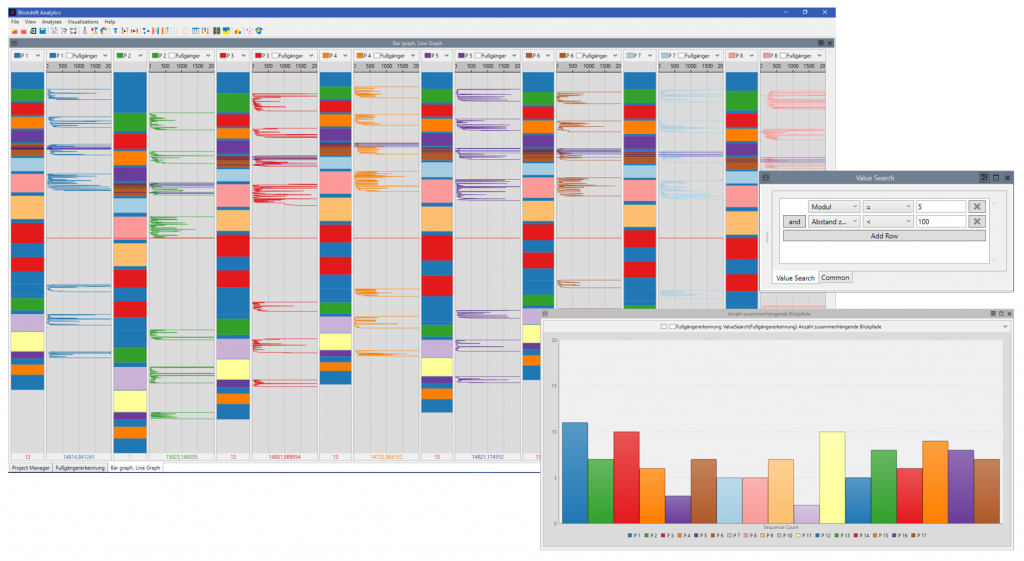
Figure 3: The model parameters have been defined by using a concatenation of Value Search components in Blickshift Analytics together with a visualization of the recorded data with Line Graphs and Bar Charts.
Therefore, we have used a concatenation of several Value Search components in Blickshift Analytics together with a visualization of the recorded data with Line Graphs and Bar Charts. Additionally, we have used the marking feature to analyze the perception in more detail, see Figure 3. For the analysis we went through every section and computed the number of cases and computed the optimal distance between the fixation position in the traffic and the pedestrians’ position. With Blickshift Analytics, this analysis task took us less than one day!
Finally, we have supported Fraunhofer IAO and BMW Group in implementing the parametrized model in the computer system of a test car. During the UR:BAN demo day in fall 2015 and the UR:BAN conference in February 2016, the results have been presented.
Publications
Diederichs, Frederik ; Brouwer, Nina ; Klöden, Horst ; Zahn, Peter ; Schmitz, Bernhard: Application of a Driver Intention Recognition Algorithm on a Pedestrian Intention Recognition and Collision Avoidance System. In: Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. ; Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. (Hrsg.) ; Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. (Hrsg.): UR:BAN Human Factors in Traffic – Approaches for Safe, Efficient and Stress-free Urban Traffic, UR:BAN Human Factors in Traffic – Approaches for Safe, Efficient and Stress-free Urban Traffic : Springer Fachmedien, 2017
Raschke, Michael ; Schmitz, Bernhard ; Wörner, Michael ; Ertl, Thomas ; Diederichs, Frederik: Application Design for an Eye Tracking Analysis based on Visual Analytics. In: Proceedings of the Symposium on Eye Tracking Research and Applications, ETRA ’16, Proceedings of the Symposium on Eye Tracking Research and Applications, ETRA ’16, 2016.

Das Institut für ubiquitäre Mobilitätssysteme der Hochschule Karlsruhe forscht im Anwendungsfeld der Mobilitätssysteme vor allem im Schnittbereich von Interaktion und Modellen in ubiquitären Systemen. Die Expertise liegt daher in allgegenwärtigen, verteilten Systemen (Ubiquitous Computing), in der Mensch-Computer Interaktion und Gebrauchstauglichkeit (Usability) ubiquitärer Systeme sowie der Modellierung komplexer Systeme und Prozessen für adaptive Systeme.