Projektergebnis: Parametrisierung eines Fahrermodells
- Analyse von 18 Datensätzen mit 16 Abschnitten innerhalb von einem Tag
- Parametrisierung eines Fahrermodells auf Basis der Analyseergebnisse
- Unterstützung bei der Implementierung des Fahrermodells in einem Testfahrzeug
Fahrermodellierung spielt eine wichtige Rolle bei der Entwicklung von Fahrassistenzsystemen und für den fahrerfreundlichen Übergang zum automatisierten Fahren. Zum Beispiel erlaubt die Vorhersage von möglichen Fahrmanövern den Software-Entwicklern die Zeitparameter der Assistenzsysteme optimal einzustellen oder Interventionen durchzuführen oder abzubrechen.
Als Teil des UR:BAN-Projektes des Fraunhofer IAO und der BMW Group haben wir die Augenbewegung von Fahrern analysiert, wenn diese Fußgänger passierten. Im Durchschnitt sind bei 15% aller Autounfälle Fußgänger involviert. Die Euro NCAP Regeln beinhalten inzwischen ebenfalls aktive Sicherheitssysteme zur aktiven Kollisionsvermeidung mit Fußgängern. Aus diesen beiden Gründen stellt die Untersuchung der Wahrnehmung von Fußgängern im Straßenverkehr einen wichtigen Forschungsgegenstand für die Straßensicherheit dar. Abbildung 1 (links) zeigt zwei typische Verkehrssituationen mit Fußgängern. Im rechten Teil von Abbildung 1 ist eine Warnkaskade dargestellt, die eine Kollision zwischen einem Fußgänger und einem Fahrzeug vermeiden soll.
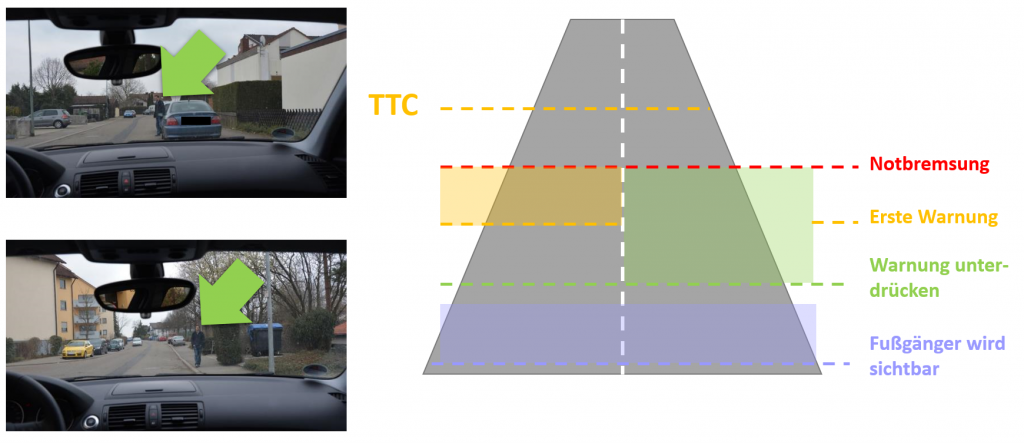
Abbildung 1: Die Untersuchung der visuellen Wahrnehmung von Fußgängern spielt eine wichtige Rolle bei der Entwicklung von Fahrassistenzsystemen, um zum Beispiel Warnungen vor Fußgängern zuverlässig auszugeben und damit eine Kollision zu vermeiden.
Die Schlüsseltechnologie für die Analyse der visuellen Wahrnehmung von Fußgängern ist Eye-Tracking. In unserem Projekt war Blickshift für die Auswertung der Augenbewegungen verantwortlich, die in einem Simulator-Experiment aufgenommen worden waren. Das Ziel bestand darin Parameter eines Zustandsübergangsmodells zu definieren, welches entscheidet, ob ein Fahrer vor einem Fußgängern gewarnt werden soll oder nicht (Abbildung 2).
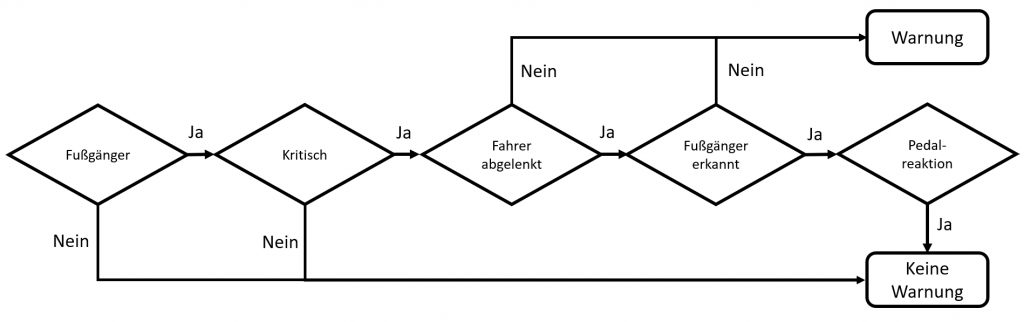
Abbildung 2: Durch die Analyse des Blickverhaltens wurde ein Zustandsübergangsmodell parametrisiert, um einen Fahrer vor einem Fußgänger zu warnen oder die Warnung zu unterdrücken (Abbildung nach Diederichs et. al).
In einem Eye-Tracking-Experiment, das in einem Fahrsimulator durchgeführt wurde, mussten 18 Probanden im Durchschnitt neun Minuten lang die gleiche Strecke fahren. Die Strecke war unterteilt in 14 Abschnitte, die verschiedene Verkehrssituationen darstellten. In manchen Abschnitten bewegten sich Fußgängern nicht, in anderen bewegten sie sich mit unterschiedlichen Geschwindigkeiten auf den Straßenbahnrand zu. Neben den Augenbewegungen wurde zusätzlich die Pedalaktivität der Fahrer erfasst.
Der kritische Parameter des Modells bestand im Abstand zwischen der Fixationsposition des Fahrers im Straßenverkehr und der Position des Fußgängers. Die Hypothese war, dass je öfters sich dieser Abstand unter einem bestimmten Grenzfall befand, umso höher die Wahrscheinlichkeit war, dass der Fahrer den Fußgänger wahrgenommen hatte. Unsere Aufgabe bestand darin, einen Vorschlag für das Setzen dieses Grenzwertes zu geben.
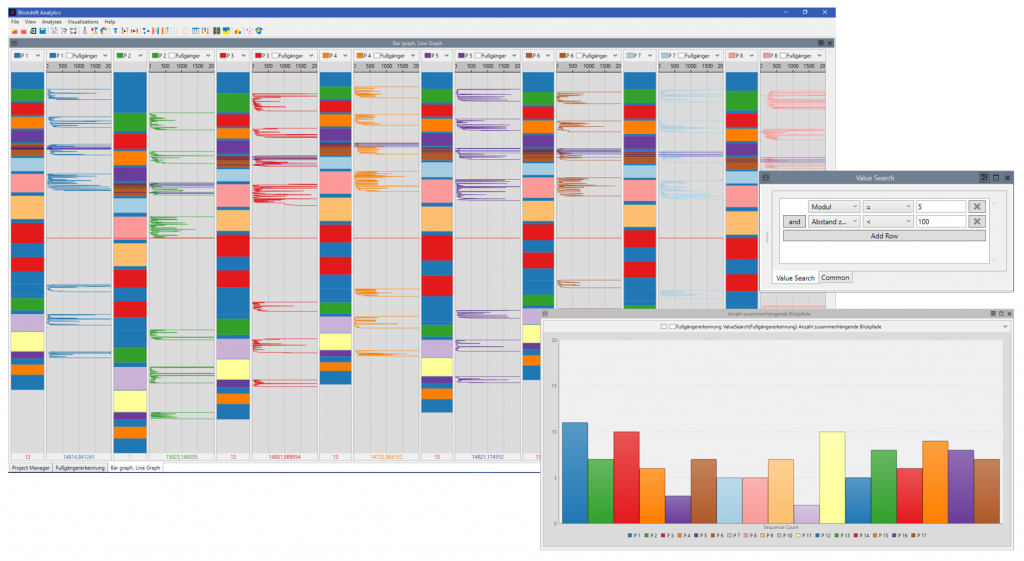
Abbildung 3: Die Modelparameter wurden mit Hilfe von Blickshift Analytics definiert. Dazu nutzten wir eine Serie aus Value Search Komponenten zusammen mit einer Visualisierung der aufgenommenen Daten durch Line Graphs und Bar Charts.
Dazu nutzten wir eine Serie von Value Search Komponenten in Blickshift Analytics zusammen mit einer Visualisierung der aufgenommenen Daten mit Hilfe von Line Graphs und Bar Charts. Zusätzlich nutzten wir die Marking-Funktion von Blickshift Analytics, um die Wahrnehmung des Fußgängers genauer zu untersuchen (Abbildung 3). Für die Analyse gingen wir dann Abschnitt für Abschnitt der Fahrstrecke durch und berechneten anschließend die optimale Distanz zwischen der Fixationsposition im Straßenverkehr und der Fußgängerposition. Mit Blickshift Analytics benötigten wir für diese Analyseaufgabe weniger als einen Tag!
Abschließend unterstützten wir das Fraunhofer IAO und die BMW Group bei der Implementierung des parametrisierten Modells in das Computersystem eines Testfahrzeugs. Während der UR:BAN Abschlussdemo im Herbst 2015 und der Abschlusspräsentation im Februar 2016 wurden die Ergebnisse vorgestellt.
Weitere Literatur
Diederichs, Frederik ; Brouwer, Nina ; Klöden, Horst ; Zahn, Peter ; Schmitz, Bernhard: Application of a Driver Intention Recognition Algorithm on a Pedestrian Intention Recognition and Collision Avoidance System. In: Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. ; Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. (Hrsg.) ; Bengler, K. ; Drüke, J. ; Hoffman, S. ; Manstetten, D. ; Neukum, A. (Hrsg.): UR:BAN Human Factors in Traffic – Approaches for Safe, Efficient and Stress-free Urban Traffic, UR:BAN Human Factors in Traffic – Approaches for Safe, Efficient and Stress-free Urban Traffic : Springer Fachmedien, 2017
Raschke, Michael ; Schmitz, Bernhard ; Wörner, Michael ; Ertl, Thomas ; Diederichs, Frederik: Application Design for an Eye Tracking Analysis based on Visual Analytics. In: Proceedings of the Symposium on Eye Tracking Research and Applications, ETRA ’16, Proceedings of the Symposium on Eye Tracking Research and Applications, ETRA ’16, 2016.

Das Institut für ubiquitäre Mobilitätssysteme der Hochschule Karlsruhe forscht im Anwendungsfeld der Mobilitätssysteme vor allem im Schnittbereich von Interaktion und Modellen in ubiquitären Systemen. Die Expertise liegt daher in allgegenwärtigen, verteilten Systemen (Ubiquitous Computing), in der Mensch-Computer Interaktion und Gebrauchstauglichkeit (Usability) ubiquitärer Systeme sowie der Modellierung komplexer Systeme und Prozessen für adaptive Systeme.